Normal (geometría)

En geometría, una normal es un objeto matemático (como una recta o vector) que es perpendicular con respecto a otro objeto determinado. Por ejemplo, la recta normal a una curva plana en un punto dado es la línea recta (infinita) perpendicular a la tangente y a la curva en el punto considerado.
Un vector normal puede tener longitud uno (en cuyo caso es un vector normal unitario) o su longitud puede representar la curvatura del objeto (un vector de curvatura).
Multiplicar un vector normal por -1 da como resultado un vector opuesto, que puede usarse para indicar de qué lado se sitúa (por ejemplo, en el interior o en el exterior de una figura).
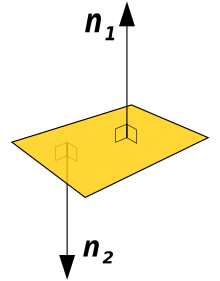
En el espacio tridimensional, la normal a una superficie en un punto P es un vector perpendicular a la tangente a la superficie en dicho punto P. La palabra normal también se utiliza como adjetivo: una recta normal a un plano, la componente normal de una fuerza, o un vector normal. El concepto geométrico de normalidad se identifica con el de ortogonalidad en otros campos de la matemática (como los ángulos rectos en trigonometría).
El concepto se ha generalizado a las variedades diferenciables de dimensión arbitraria integradas en un espacio euclídeo. El espacio vectorial normal o espacio normal de una variedad en el punto es el conjunto de vectores que son ortogonales al espacio tangente en .

Los vectores normales son de especial interés en el caso de curvas y superficies suaves.
La normal se usa a menudo en gráficos 3D por computadora (observe el singular, ya que solo se definirá una normal) para determinar la orientación de una superficie hacia luz para generar el sombreado plano, o la orientación de cada una de las esquinas de una superficie (sus vértices) para imitar una superficie curva empleando el sombreado de Phong .
El pie de una normal en un punto buscado Q (análogo al pie de una perpendicular) se puede definir en el punto P de la superficie donde el vector normal contiene a Q.
La distancia normal de un punto Q a una curva o a una superficie es la distancia euclídea entre Q y su pie P.
Normal a superficies en el espacio 3D

Cálculo de la normal a una superficie
- Para un polígono convexo (como por ejemplo, un triángulo), se puede calcular un vector normal al plano que lo contiene como resultado del producto vectorial de dos de sus aristas no paralelas entre sí.
- Para un plano dado por la ecuación , su vector normal es el vector .


- Para un plano cuya ecuación está dada en forma paramétrica ; donde es un punto en el plano y son vectores no paralelos pertenecientes al plano, una normal al plano es un vector normal tanto a como a que se puede calcular como el producto vectorial






- Si una superficie en el espacio tridimensional (que puede no ser un plano) es parametrizada mediante un sistema de coordenadas curvilíneas con variables reales y , entonces una normal a S es, por definición, una normal a un plano tangente a S, dada por el producto vectorial de las derivadas parciales:






- Si una superficie se define mediante una función implícita como el conjunto de puntos que satisfacen la ecuación , entonces una normal en un punto de la superficie viene dada por el gradiente , teniendo en consideración que el gradiente en cualquier punto es perpendicular a los conjuntos de nivel de existentes en el entorno del punto.



- Para una superficie en dada como la gráfica de una función , se puede encontrar una normal que apunta hacia arriba a partir de la parametrización dando



- o más sencillamente, a partir de su forma implícita , dando


- Dado que en los puntos singulares de una superficie no es posible definir un plano tangente, no existe una normal bien definida en ellos, como por ejemplo en el caso del vértice de un cono. En general, es posible definir una normal en casi todos los puntos de una superficie definida por una función lipschitziana.
Orientación

La normal a una (hiper)superficie generalmente se escala para tener longitud unitaria, pero no tiene una dirección única, ya que su opuesto también es una vector normal unitario. Para una superficie que es la frontera topológica de un conjunto en tres dimensiones, se pueden distinguir entre dos orientaciones normales, la normal que apunta hacia adentro y la normal que apunta hacia afuera. Para una superficie orientada, la orientación de los vectores normales suele estar determinada por la regla de la mano derecha o su análogo en dimensiones superiores.
Si la normal se construye como el producto cruzado de vectores tangentes (como se describe en el texto anterior), entonces se obtiene un pseudovector.
Transformación de las normales
Nota: En esta sección solo se usa la matriz de , ya que la operación de traslación es irrelevante para el cálculo.

Al aplicar una transformación geométrica a una superficie, suele ser útil deducir las normales de la superficie resultante a partir de las normales originales.
Específicamente, dada una matriz de transformación de 3×3, es posible determinar la matriz que transforma un vector perpendicular al plano tangente en un vector perpendicular al plano tangente transformado mediante el siguiente procedimiento:






Denotando n′ como , se debe determinar :


Elegir de modo que o satisfaga la ecuación anterior, dando un perpendicular a o un perpendicular a según sea necesario.





Por lo tanto, se debe utilizar la matriz inversa transpuesta de la transformación lineal al transformar las normales de la superficie. La inversa transpuesta es igual a la matriz original si la matriz es ortonormal, es decir, cuando es puramente rotacional (sin escalamiento ni cizallamiento).
Hipersuperficies en el espacio n-dimensional
Para un hiperplano -dimensional en el espacio -dimensional dado por su representación paramétrica:




donde es un punto en el hiperplano y para son vectores linealmente independientes que pertenecen al hiperplano, una normal al hiperplano es cualquier vector en el núcleo de la matriz , lo que significa que Es decir, cualquier vector ortogonal a todos los vectores que están en el plano es por definición una normal a la superficie. Alternativamente, si el hiperplano se define como el conjunto solución de una única ecuación lineal , entonces el vector es normal.







La definición de una normal a una superficie en un espacio tridimensional se puede extender a hipersuperficies dimensionales en . Una hipersuperficie puede ser localmente definida de forma implícita como el conjunto de puntos que satisfacen una ecuación donde es una función escalar dada. Si es diferenciable, entonces la hipersuperficie es una variedad diferenciable en el entorno de los puntos donde el gradiente no es cero. En estos puntos un vector normal viene dado por el gradiente:




La recta normal es el subespacio unidimensional con base .

Variedades definidas por ecuaciones implícitas en el espacio n-dimensional
Una variedad diferencial definida por ecuaciones implícitas en el espacio dimensional es el conjunto de ceros comunes de un conjunto finito de funciones en variables diferenciables
- .

La matriz jacobiana de la variedad es la matriz cuya -ésima fila es el gradiente de . Según el teorema de la función implícita, la variedad se comporta como tal en el entorno de un punto donde la matriz jacobiana tiene rango . En tal punto el espacio vectorial normal es el espacio vectorial generado por los valores en de los vectores gradientes de .





En otras palabras, una variedad se define como la intersección de hipersuperficies, y el espacio vectorial normal en un punto es el espacio vectorial generado por los vectores normales de las hipersuperficies en el punto.
El 'espacio normal (afín) en un punto de la variedad es el espacio afín que pasa por y es generado por el espacio vectorial normal en .
Estas definiciones pueden ampliarse literalmente a los puntos en los que la variedad deja de serlo.
Ejemplo
Sea V la variedad definida en el espacio tridimensional por las ecuaciones:

Esta variedad es la unión del eje y el eje .


En un punto donde , las filas de la matriz jacobiana son y . Por lo tanto, el espacio afín normal es el plano de ecuación . De manera similar, si , el plano normal en es el plano de ecuación .








En el punto las filas de la matriz jacobiana son y . Por lo tanto, el espacio vectorial normal y el espacio afín normal tienen dimensión 1 y el espacio afín normal es el eje .


Ecuaciones genéricas
Normal a una curva 3D
Sea la ecuación vectorial de una curva definida en el espacio tridimensional. Entonces, la dirección de la normal principal se puede obtener como el doble producto vectorial: En el caso de la parametrización natural de la curva (en función de su longitud de arco), el vector unitario de la normal principal[1] es igual a .

![{\displaystyle [[\mathbf {r} ',\ \mathbf {r} ''],\ \mathbf {r} '].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1ee7697e2619ae6eceeffeda8525c1fd2068d8ea)

La ecuación vectorial de la binormal en el punto tiene la forma:

- .
![{\displaystyle {\boldsymbol {r}}(\lambda )={\boldsymbol {r}}(t_{0})+\lambda [{\boldsymbol {r}}'(t_{0}),~{\boldsymbol {r}}''(t_{0})]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c277eb7a093ea6578e5576e573c6fe77ae76c444)
La ecuación del plano normal[1] en el punto :


Normal a una curva plana
Para una curva plana, el plano que la contiene coincide con el plano osculador. Solo existe una normal en cada punto, (si se prescinde del signo), la principal, y su ecuación en el punto tiene la siguiente forma:

| Tipo de ecuación | Ecuación de la curva | Ecuación de la normal |
|---|---|---|
| Paramétrica | ||
| Explícita | ||
| Implícita |





Normal a una superficie
En geometría diferencial, las superficies que se examinan suelen estar sujetas a condiciones relacionadas con la posibilidad de utilizar métodos de cálculo diferencial. Como regla general, estas son condiciones para determinar la suavidad de la superficie, es decir, la existencia en cada punto de la superficie de elementos como un determinado plano tangente, o un valor de la curvatura. Estos requisitos se reducen al hecho de que las funciones que definen la superficie se suponen una, dos, tres veces y, en algunos casos, un número ilimitado de veces diferenciables o incluso que se trata de funciones analíticas. En este último caso, se impone una condición de regularidad adicional (véase el artículo superficie (topología)). Un conocido ejemplo de un punto de una superficie donde la normal no está definida es el vértice de un cono, dado que no hay ningún plano tangente.
Las coordenadas del vector unitario normal para diferentes métodos de definir una superficie se dan en la tabla siguiente:
| Coordenadas de la normal en un punto de una superficie | |
|---|---|
| Ecuación paramétrica: | |
| Ecuación implícita: | |
| Ecuación explícita: |





Las expresiones siguientes corresponden a las operaciones anteriores: . Todas las derivadas se toman en el punto . De las fórmulas se desprende claramente que en el caso de una ecuación implícita, la dirección de la normal a la función coincide con la dirección de su gradiente.



La sección de una superficie por un plano que contiene la normal de la superficie en un punto dado forma una determinada curva, que se denomina sección normal de la superficie. La normal principal de una sección normal coincide con la normal a la superficie (sin considerar su signo).
Si la curva de la superficie no es una sección normal, entonces su normal principal forma un cierto ángulo con la normal de la superficie. Entonces, la curvatura de la curva está relacionada con la curvatura de la sección normal (con la misma tangente) de acuerdo con el teorema de Meusnier:[2]



La curvatura de una sección normal en un punto dado depende de la dirección de esta sección; si la curvatura no es constante, entonces el máximo y el mínimo se alcanzan en dos direcciones mutuamente perpendiculares, llamadas direcciones principales. En una esfera o en los puntos extremos de un elipsoide, la curvatura es constante y todas las direcciones son direcciones principales.[2]
Aplicaciones
- Las normales de superficie son útiles para definir integrales de superficie de campos vectoriales.
- Las normales de superficie se usan comúnmente en gráficos 3D por computadora para cálculos de iluminación (véase la ley de Lambert), a menudo ajustadas por un mapeado normal.
- Las capas de render que contienen información normal de la superficie se pueden usar en composición digital para cambiar la iluminación aparente de los elementos renderizados.
- En visión artificial, las formas de los objetos 3D se estiman a partir de normales a las superficies utilizando estéreo fotometría.[3]
- El vector normal se puede obtener como el gradiente de la función distancia con signo.
Normal en óptica geométrica
Artículo principal: Imagen especular
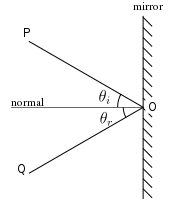
Se denomina rayo normal al que apunta perpendicularmente hacia afuera de la superficie de un medio óptico en un punto dado.[4] En el estudio de la reflexión de la luz, ángulo de incidencia y ángulo de reflexión son respectivamente el ángulo entre la normal y el rayo incidente (en el plano de incidencia) y el ángulo entre la normal y el rayo reflejado.
Véase también
- Espacio dual
- n-vector (vector normal a un elipsoide)
- Fibrado normal
- Vector axial
- Componentes tangencial y normal
- Normal a un vértice
Referencias
- ↑ a b Rashevsky P.K., 1956.
- ↑ a b Pogorelov A. I., 1974.
- ↑ Ying Wu. «Radiometry, BRDF and Photometric Stereo». Northwestern University.
- ↑ «The Law of Reflection». The Physics Classroom Tutorial. Archivado desde el original el 27 de abril de 2009. Consultado el 31 de marzo de 2008.
Bibliografía
- «Normal». Enciclopedia Matemática (en 5 volúmenes) 3. Moscú: Enciclopedia Soviética. 1982.
- Pogorelov A. I. (1974). Geometría diferencial (6ª edición edición). Moscú: Nauka. p. 176.
- Rashevsky P.K. (1956). GITTL, ed. Curso de Geometría Diferencial (4ª edición edición). Moscú.
Enlaces externos
- Weisstein, Eric W. «Normal Vector». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
- Una explicación de vectores normales de MSDN de Microsoft
- Pseudocódigo claro para calcular una superficie normal a partir de un triángulo o un polígono.
| Control de autoridades |
|
|---|
 Datos: Q273176
Datos: Q273176










